- worst case height: h = O(N)
- left to right: ascending order
- Select(k): return the value of the k-th smallest element (1-based index)
- Rank(v): return the rank k of element with value v
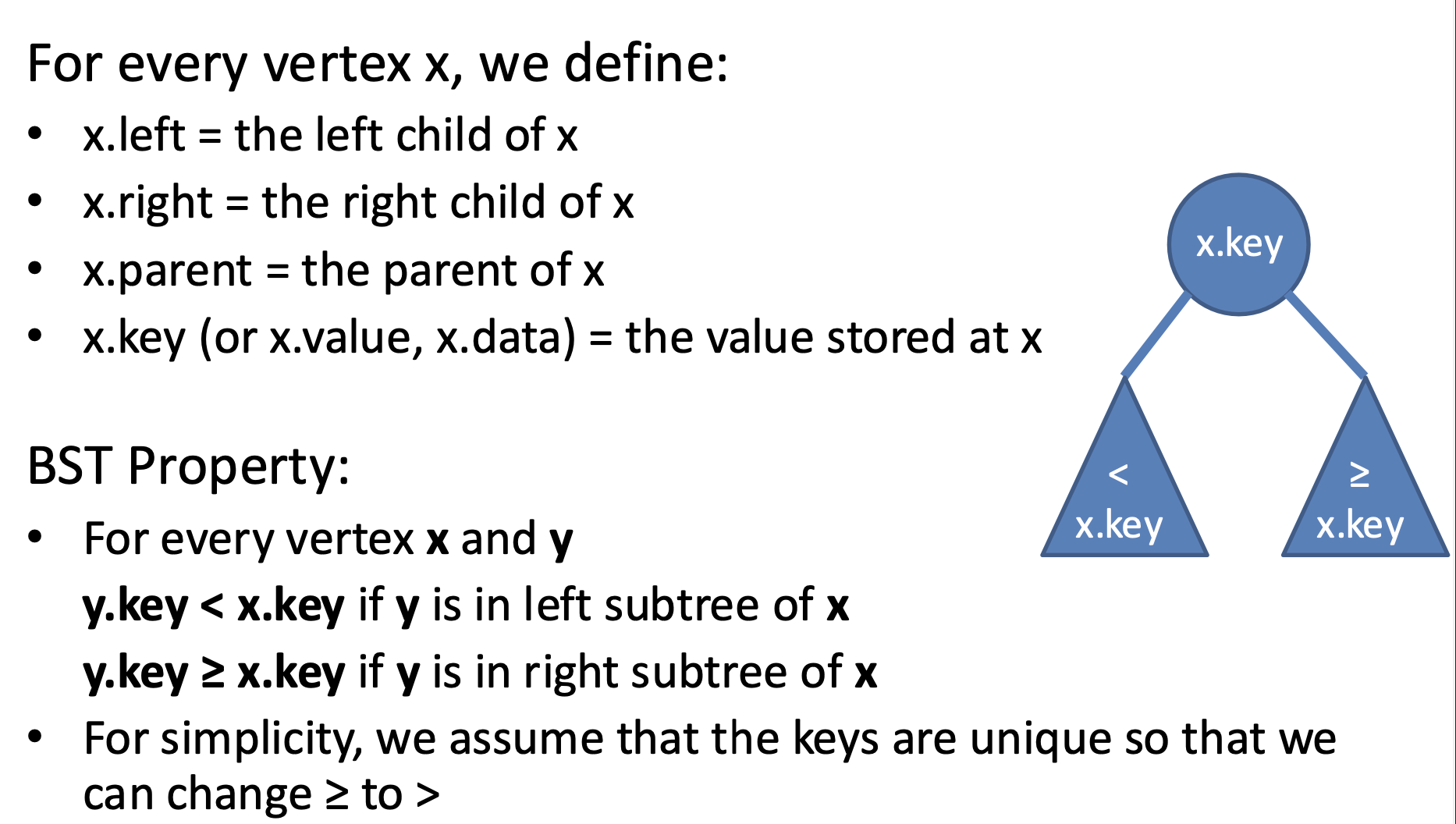
- For every node in the BST, the value of every node in its left subtree must be smaller than it, and the value of every node in its right subtree must be greater than it
Traversal
- inorder
- a vertex is visited three times during inorder traversal (from parent and from left + right children)
- O(N)
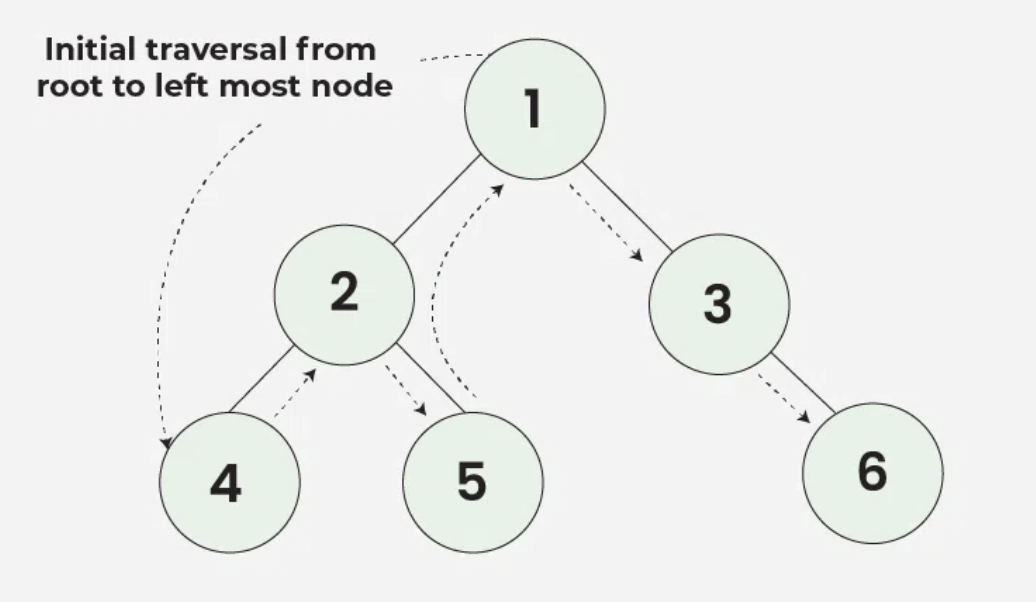
inorder(N) // 4 2 5 1 3 6
if N != null:
inorder(N.left)
process(N) // print
inorder(N.right)
preorder(N) // 1 2 4 5 3 6
if N != null:
process(N) // print
inorder(N.left)
inorder(N.right)
postorder(N) // 4 5 2 6 3 1
if N != null:
inorder(N.left)
inorder(N.right)
process(N) // print
Extra
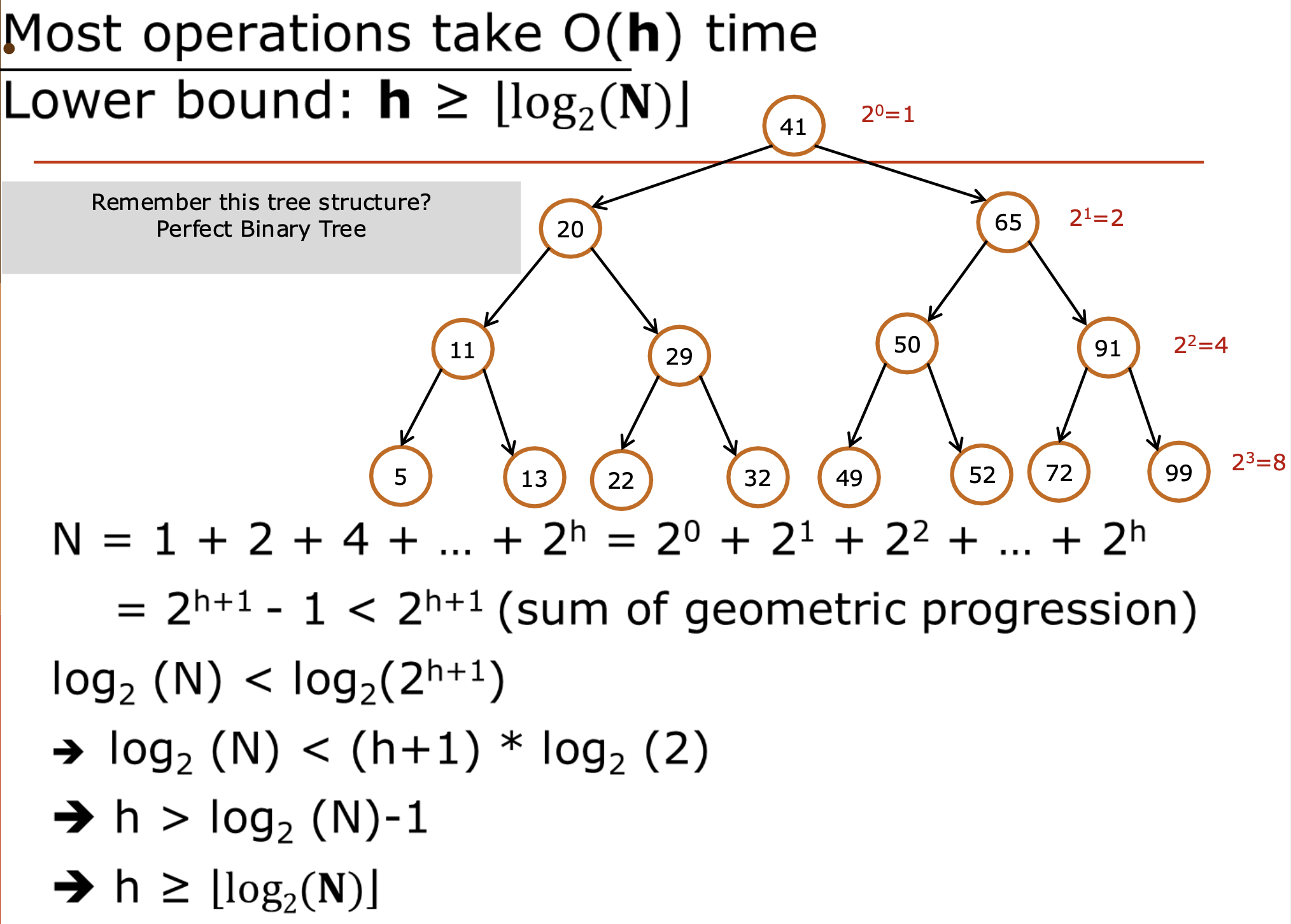
- how many nodes in a perfect BST of height h?
- 2^h+1 - 1
- height of a perfect BST with N nodes is log N
Deletion
delete(x, T)
// case 1
if T has no children
if x == T.item
return empty tree
else return NOT FOUND
// case 2
if T has only 1 child
// 2A
if left child
if x == T.item
return T.left
else if x < T.item
T.left = delete(x, T.left)
else return NOT FOUND
return T
// 2B
if right child
if x == T.item
return T.right
else if x > T.item
T.right = delete(x, T.right)
else return NOT FOUND
return T
// case 3
if T has 2 children
if x == T.item
// replace T.item by
// min item of right subtree
T.item = findMin(T.right)
// delete original copy of min item
// from right subtree
T.right = delete(T.item, T.right)
else if x < T.item
T.left = delete(x, T.left)
else // x > T.item
T.right = delete(x, T.right)
return T
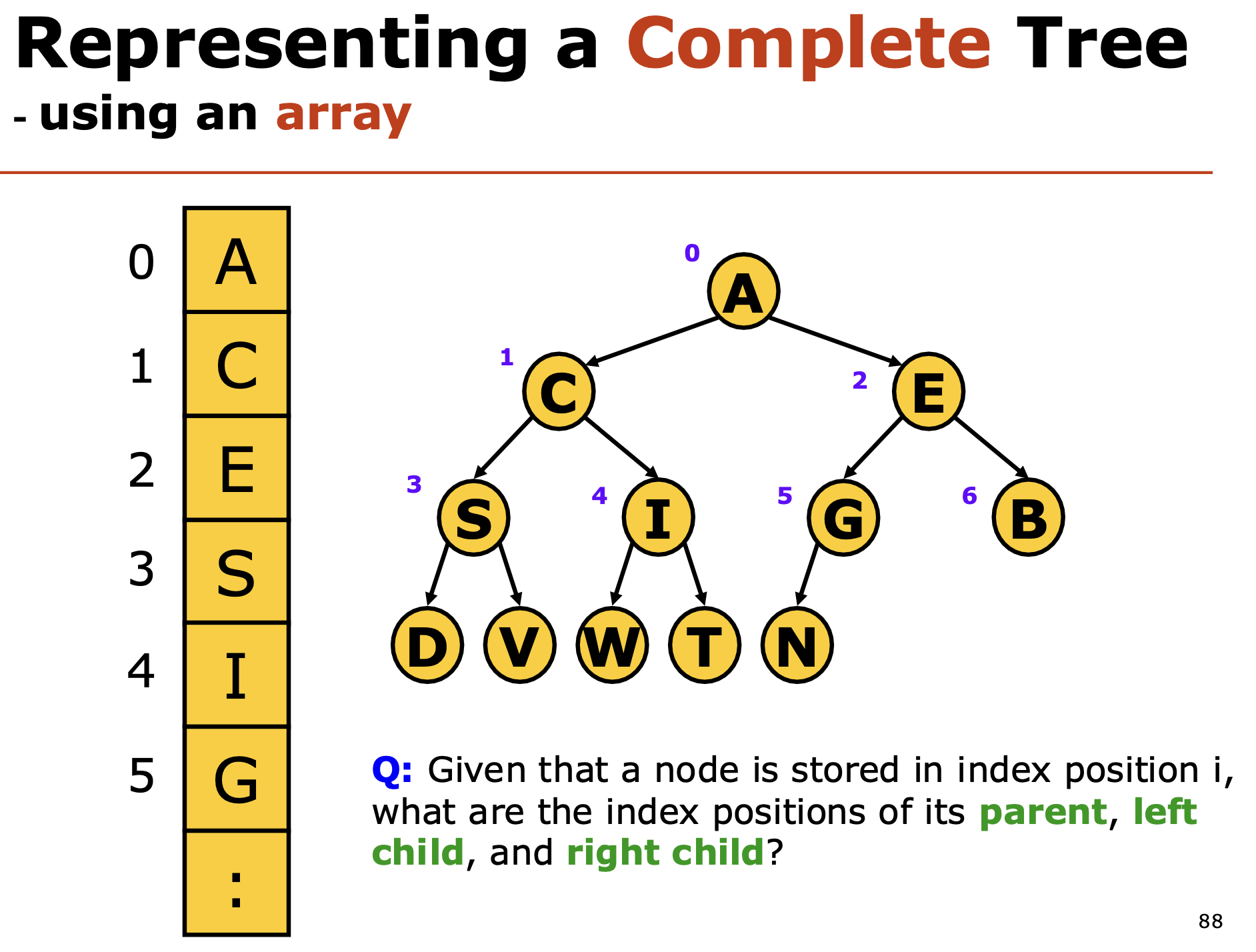
- Parent index: parent(i) = ⌊(i-1)/2⌋
(if i>0, since the root node does not have a parent).
- Left child index: left(i) = 2i+1
(if 2i+1 is within the bounds of the array).
- Right child index: right(i) = 2i+2
(if 2i+2 is within the bounds of the array).
// rank, select
function RANK(node, v)
if node.key = v then
return node.left.size + 1
else if node key > v then
return RANK(node.left, v)
else
return node.left.size + 1 + RANK(node.right, v)
end if
end function
function SELECT(node, k)
q = node.left.size
if q + 1 = k then
return node.key
else if q + 1 > k then
return SELECT(node.left, k)
else
return SELECT(node.right, k-q-1)
end if
end function-
search(v):
- if v > cur, go right, if v < cur go left
// iterative solution while T is not empty if T.item == x return T else if T.item > X then T = T.left else T = T.right return null // T is empty, so X is not in T // recursive solution Search(x, T) if T is empty return null // x is not in T if x == T.item return T else if x < T.item return search(x, T.left) else return search(x, T.right)- runs in O(h)
-
findMin() / findMax():
- traverse to leftmost / rightmost
- O(h)
-
insert(v):
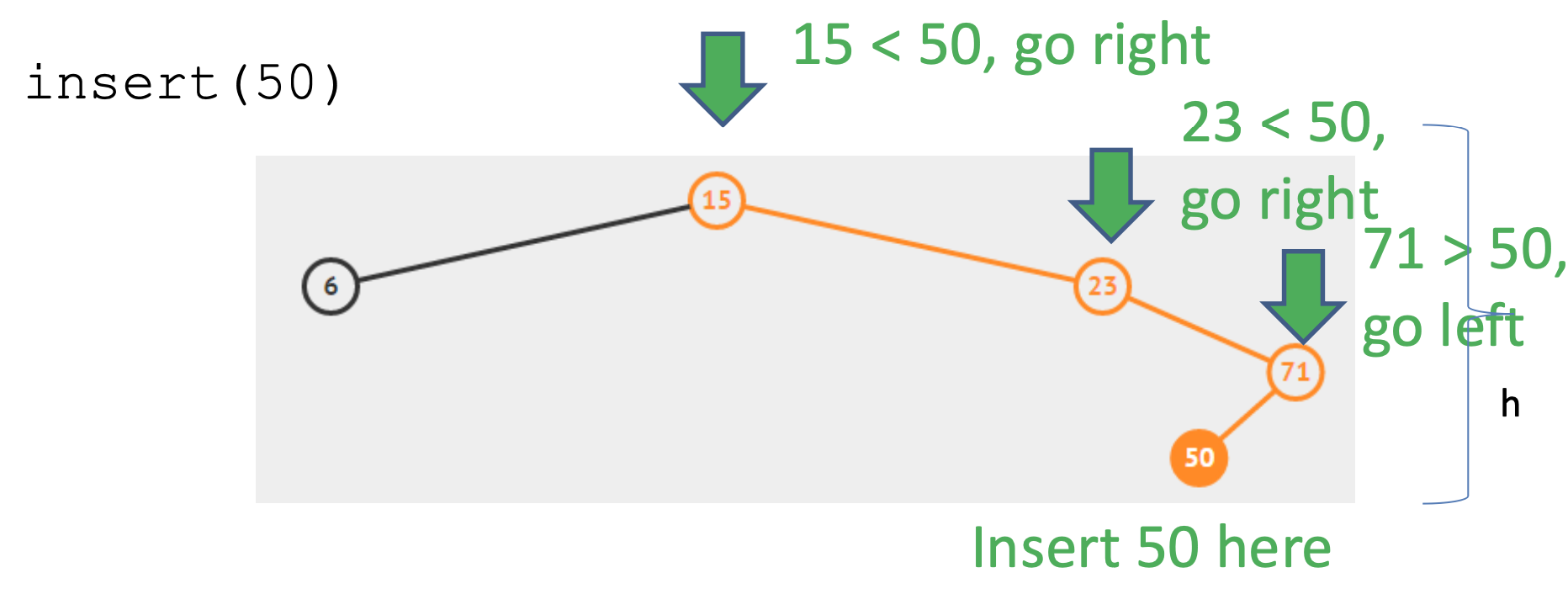
insert(x, T) if T is empty return new TreeNode(x) // tree w only node x else if x < T.item T.left = insert(x, T.left) else if x > T.item T.right = insert(x, T.right) else return ERROR! // X already in T, x = T.item return T // return the new tree T // this method assumes that we don't allow // duplicate key values in the BST- O(h)
-
successor(v):
- minimum in RIGHT subtree
- else keep going up until right turn
- O(h)
-
predecessor(v):
- maximum in LEFT subtree
- else keep going up until left turn
- O(h)
Deletion Analysis
-
Delete a BST vertex v, find v in O(h), then three cases:
- v has no children:
- just remove the corresponding vertex v → O(1)
- v has 1 child:
- connect v.left (or v.right) to v.parent and vice versa → O(1)
- then remove v → O(1)
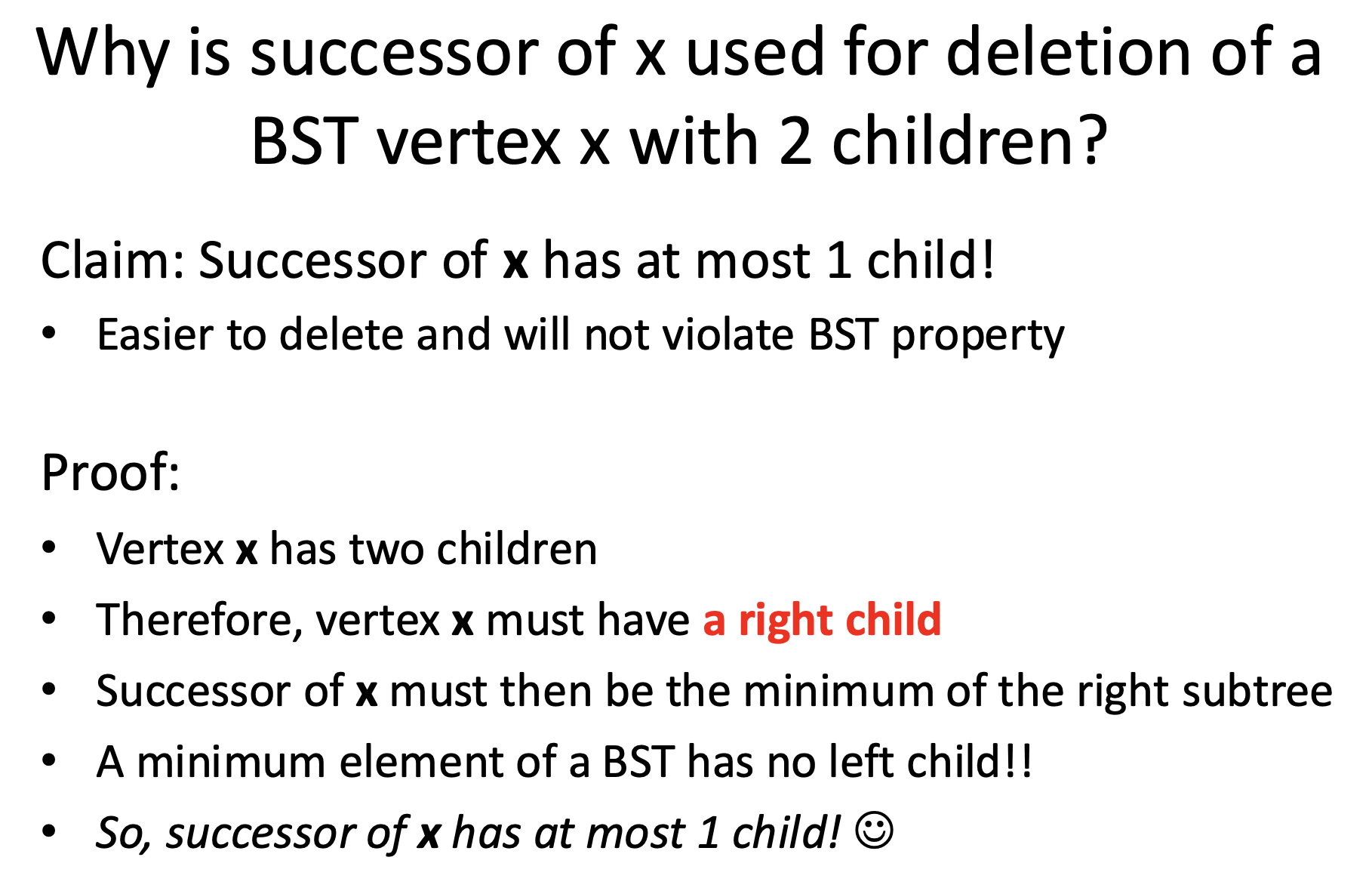
- v has 2 children: (replace v with successor)
- find x = successor(v) → O(h)
- replace v.key with x.key → O(1)
- delete x in v.right (otherwise have duplicate) → O(h)
- running time: O(h)
Implementations:
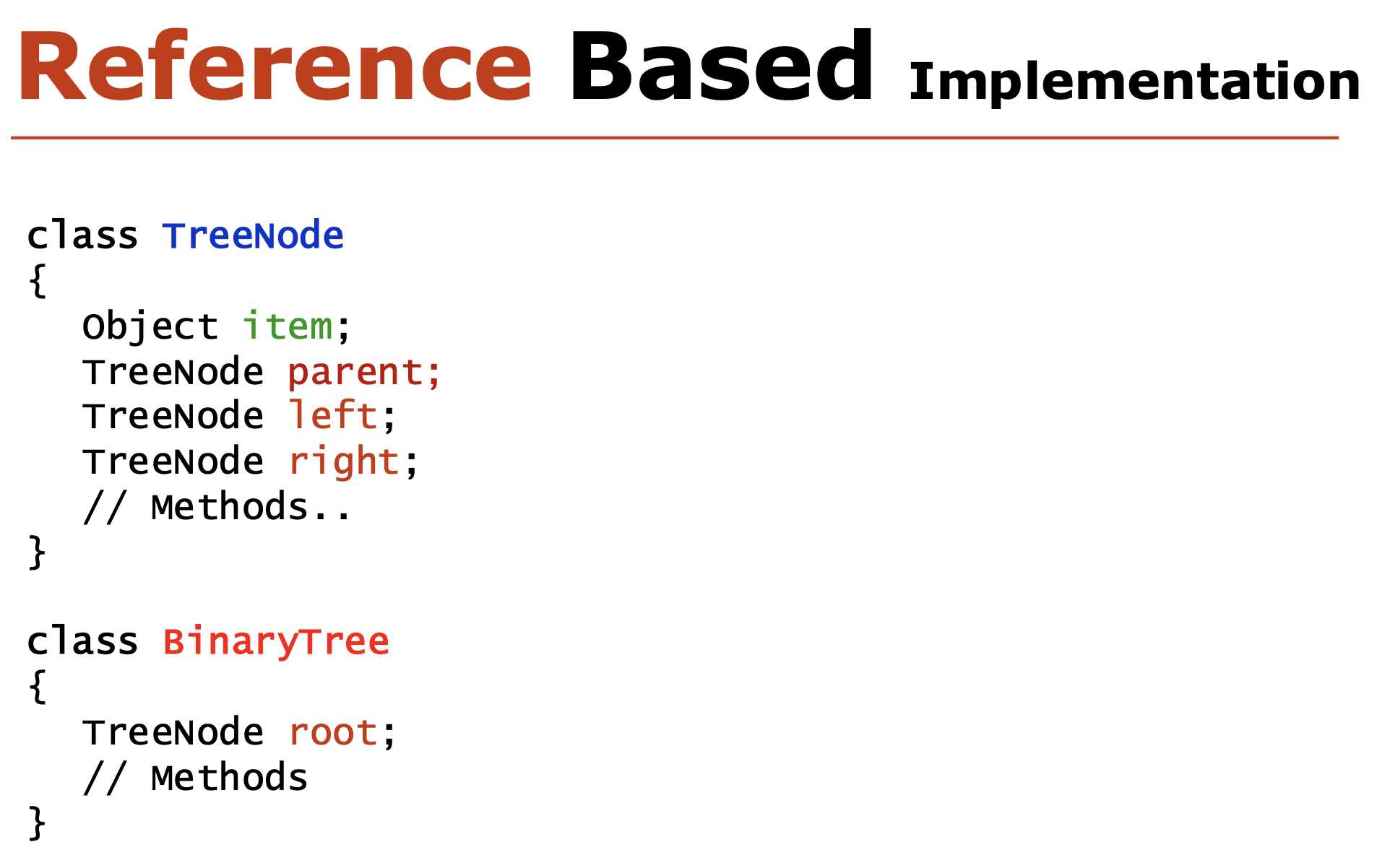
height, size
height(T) if T is empty return -1 else return 1 + max(height(T.left), height(T.right)) size(T) if T is empty return 0 else return 1 + size(T.left) + size(T.right)
- v has no children:

h = O(log N) for balanced BST, O(n) worst case for unbalanced, N = num of nodes
Unbalanced BST degrades to O(N) — fixed by L11 AVL Tree (self-balancing, guarantees h = O(log N))
BST vs Hashing → L7 Hashing: BST supports ordered ops (range query, rank, select, successor); hashing is O(1) average but unordered
BST vs Heap → L8 Heap: Heap only supports min/max efficiently; BST supports search, insert, delete on any key